 公司簡介
公司簡介 企業文化
企業文化 榮譽資質
榮譽資質 企業裝備
企業裝備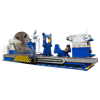 重型臥式車牀系列
重型臥式車牀系列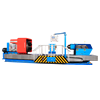 軋輥車牀系列
軋輥車牀系列 大型臥式車牀系列
大型臥式車牀系列 數控端面車牀系列
數控端面車牀系列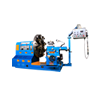 大型落地車牀系列
大型落地車牀系列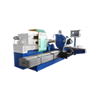 車銑磨組合機牀系列
車銑磨組合機牀系列 立式車牀系列
立式車牀系列 龍門銑牀系列
龍門銑牀系列 公司新聞
公司新聞 行業動態
行業動態 常見問題
常見問題

 歐洲
歐洲 南美洲
南美洲 北美洲
北美洲 中東
中東 東南亞
東南亞 東亞
東亞爲了鎖住與伺服電機相連的垂直或傾斜工作臺,防止機牀工作臺下滑,須對伺服電機進行抱閘控制。一般來說,牀工作臺下滑,須對伺服電機進行抱閘控制。一般來說,伺服電機採用帶制動器的伺服電但在實際應用中,在機牀上電、下電、伺服報警時,偶爾會出現工作臺下滑的現象。但在實際應用中,在機牀上電、下電、伺服報警時,偶爾會出現工作臺下滑的現象。對接觸瞭解到的抱閘控制的故障來說,主要有接線方法不正確、參數設置不合理、電機選型不當(制動器額定力矩偏小)等原因引起。方法不正確、參數設置不合理、電機選型不當(制動器額定力矩偏小)等原因引起。參數設置不合理、電機選型不當等原因引起的問題比較好處理。文將從原理分析入手,置不合理、電機選型不當等原因引起的問題比較好處理。本文將從原理分析入手,介紹一種比較有效的接線方法。
斜牀身數控車牀的抱閘控制方法可參考其進行。抱閘控制要求總體要求:機牀上電後正常工作時,伺服電機抱閘釋放;機牀斷電或伺服報警後,總體要求:機牀上電後正常工作時,伺服電機抱閘釋放;機牀斷電或伺服報警後,伺服電機制動並保持工作臺。而且,在機牀上電、下電、伺服報警時,機制動並保持工作臺。而且,在機牀上電、下電、伺服報警時,不允許工作臺出現瞬時下滑的現象。因此,在機牀上電、下電、伺服報警等情況時,還必須滿足:滑的現象。因此,在機牀上電、下電、伺服報警等情況時,還必須滿足:機牀上電:伺服電機先激勵,延時後再鬆開抱閘。
機牀上電:伺服電機先激勵,延時後再鬆開抱閘。運行時報警或突然掉電:高速運轉下的電機先減速(運行時報警或突然掉電:高速運轉下的電機先減速(由於在高速下制動會嚴重影響制動器的轉下的電機先減速壽命,甚至會損壞電機,此點在下文“失電控制器”原理介紹時會給予說明)後再抱緊電機,壽命,甚至會損壞電機,此點在下文“失電控制器”原理介紹時會給予說明)後再抱緊電機,延時後再關閉電機激勵。延時後再關閉電機激勵。機牀下電:先抱緊電機,由於制動器動作需要時間,因此,機牀下電:先抱緊電機,由於制動器動作需要時間,因此,必須延時後才能再關閉電機激勵。原理分析失電制動器系列制動器,帶制動器的sjt伺服電機採用intorqbfk457系列制動器,intorqbfk457系列制動器爲常閉型設計,即失電時制動,通電時釋放。dc24v,500ms。閉型設計,即失電時制動,通電時釋放。其工作電源爲dc24v,制動器動作時間小於500ms。
系列制動器的控制原理爲當制動器線圈通電時,制原理爲:intorqbfk457系列制動器的控制原理爲:當制動器線圈通電時,線圈產生磁場使銜鐵盤吸向磁軛,銜鐵盤與制動盤脫離;當線圈斷電時,磁通消失,銜鐵盤被釋放,向磁軛,銜鐵盤與制動盤脫離;當線圈斷電時,磁通消失,銜鐵盤被釋放,彈簧施壓於銜鐵盤,將制動盤壓緊,由摩擦產生制動力矩達到制動的目的。鐵盤,將制動盤壓緊,由摩擦產生制動力矩達到制動的目的。由於制動力矩是由摩擦而產生的,因此,該失電制動器只能用於保持工作臺,不能用於強制停止機器運動,生的,因此,該失電制動器只能用於保持工作臺,不能用於強制停止機器運動,處於運動狀態的機器必須先減速或運動停止後再行抱閘。

 客服1
客服1  客服2
客服2